Trajectory Optimization For Hybrid Wheeled Legged Robots In Challenging Terrain

Howard Kelly 2007 Optimal Rough Terrain Trajectory Generation For Wheeled Mobile Robots | PDF ...
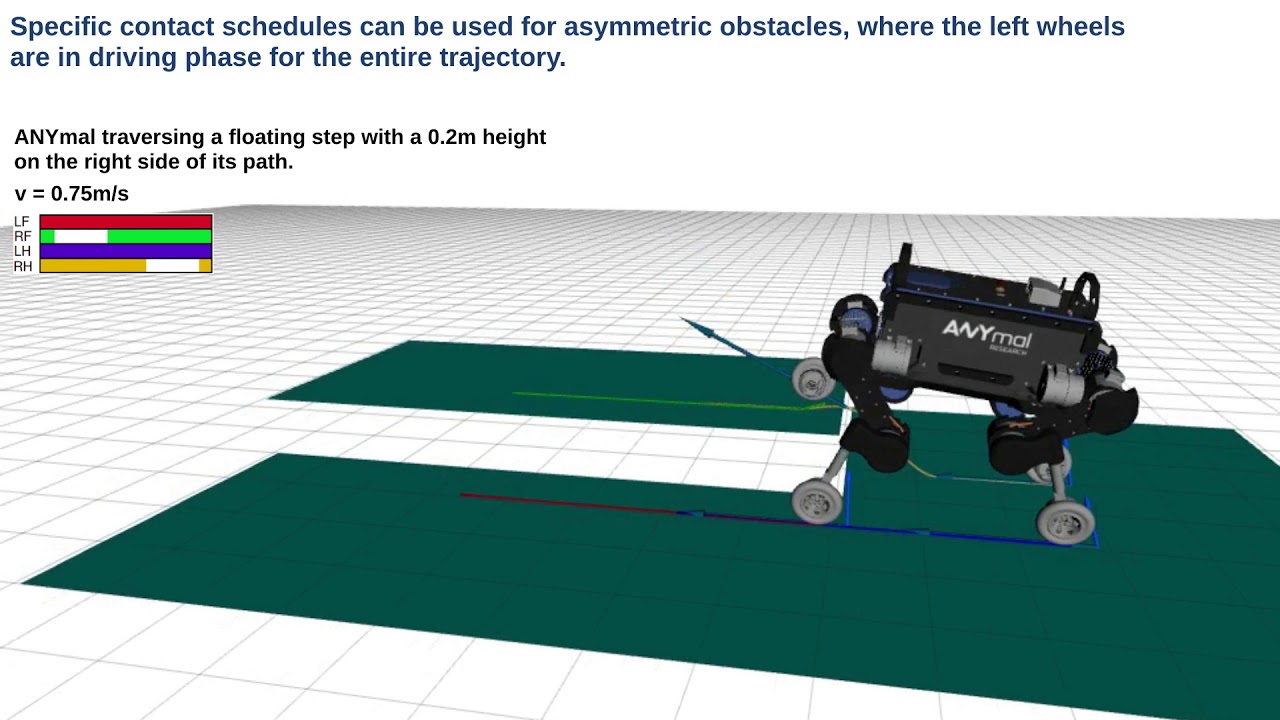
Howard Kelly 2007 Optimal Rough Terrain Trajectory Generation For Wheeled Mobile Robots | PDF ... The wheels with the ability of the legs to cope with unstructured environments. this paper presents a trajectory optimization framework that allows wheeled legged robots to navigate in challenging terrain, e. In this letter, we present a trajectory optimization formulation for wheeled legged robots that optimizes over the base and wheels’ positions and forces and takes into account the terrain information while computing the plans. this enables us to find optimal driving motions over challenging terrain.
 Driving Motions For Wheeled-Legged Robots In Rough Terrain Using 2D Trajectory Optimization")
(PDF) Driving Motions For Wheeled-Legged Robots In Rough Terrain Using 2D Trajectory Optimization
(PDF) Driving Motions For Wheeled-Legged Robots In Rough Terrain Using 2D Trajectory Optimization In this paper, we present an online trajectory opti mization framework for wheeled quadrupedal robots capable of executing hybrid walking driving locomotion strategies. In general, the challenges with wheeled legged locomotion involve trajectory generation and motion control for trajectory tracking. this thesis focuses in particular on the trajectory. This article presents an optimization based approach that leverage ideas from computational geometric mechanics to generate safe and high quality wheel leg hybrid motions among obstacles. Rithms optimizing the robot's whole body trajectory over a receding horizon. we propose a novel whole body mpc as a s. ngle task formulation that simultaneously optimizes wheel and torso motions. this approach accurately predicts the robot's motion and automatically discove.

Figure 3 From State Estimation For Hybrid Wheeled-Legged Robots Performing Mobile Manipulation ...
Figure 3 From State Estimation For Hybrid Wheeled-Legged Robots Performing Mobile Manipulation ... This article presents an optimization based approach that leverage ideas from computational geometric mechanics to generate safe and high quality wheel leg hybrid motions among obstacles. Rithms optimizing the robot's whole body trajectory over a receding horizon. we propose a novel whole body mpc as a s. ngle task formulation that simultaneously optimizes wheel and torso motions. this approach accurately predicts the robot's motion and automatically discove. In this letter, we present an online trajectory optimization framework for wheeled quadrupedal robots capable of executing hybrid walking driving locomotion strategies. In this paper, we present an online trajectory optimization framework for wheeled quadrupedal robots capable of executing hybrid walking driving locomotion strategies. Trajectory optimization framework for wheeled quadrupedal robots capable of executing hybrid walking driving locomotion strategies. by breaking down the optimization problem into a wheel and base trajectory planning, locomotion planning for high dimensional wheeled legged robots becomes more tracta. Abstract—this paper presents a trajectory optimization approach to the motion generation problem of hybrid lo comotion strategies for a wheeled legged quadrupedal robot with steerable wheels.

Model Predictive Control For Trajectory-tracking And Formation Of Wheeled Mobile Robots ...
Model Predictive Control For Trajectory-tracking And Formation Of Wheeled Mobile Robots ... In this letter, we present an online trajectory optimization framework for wheeled quadrupedal robots capable of executing hybrid walking driving locomotion strategies. In this paper, we present an online trajectory optimization framework for wheeled quadrupedal robots capable of executing hybrid walking driving locomotion strategies. Trajectory optimization framework for wheeled quadrupedal robots capable of executing hybrid walking driving locomotion strategies. by breaking down the optimization problem into a wheel and base trajectory planning, locomotion planning for high dimensional wheeled legged robots becomes more tracta. Abstract—this paper presents a trajectory optimization approach to the motion generation problem of hybrid lo comotion strategies for a wheeled legged quadrupedal robot with steerable wheels.
Trajectory Optimization for Hybrid Wheeled-Legged Robots in Challenging Terrain
Trajectory Optimization for Hybrid Wheeled-Legged Robots in Challenging Terrain
Related image with trajectory optimization for hybrid wheeled legged robots in challenging terrain

 Driving Motions For Wheeled-Legged Robots In Rough Terrain Using 2D Trajectory Optimization")




 Editorial: Advancements In Trajectory Optimization And Model Predictive Control For Legged ...")


 Trajectory Optimization For Wheeled-Legged Quadrupedal Robots Using Linearized ZMP Constraints")
 Hybrid Legged-Wheeled Robotic Platforms: Survey On Existing Solutions")
 Modeling And Analysis In Trajectory Tracking Control For Wheeled Mobile Robots With Wheel ...")
Related image with trajectory optimization for hybrid wheeled legged robots in challenging terrain




About "Trajectory Optimization For Hybrid Wheeled Legged Robots In Challenging Terrain"
Comments are closed.