Autonomous Navigation Of Mobile Robots From Basic Sensing To Problem Solving Pdf Pdf Robot

"Autonomous Navigation Of Mobile Robots From Basic Sensing To Problem Solving PDF | PDF | Robot ...
"Autonomous Navigation Of Mobile Robots From Basic Sensing To Problem Solving PDF | PDF | Robot ... Starting from basic sensing technology used in the ma jority of mobile robotic systems, the introduction of sensor fusion techniques allows to obtain useful infor mation to solve the localization, mapping and naviga tionproblems. A comprehensive study on devices/sensors and prevalent sensor fusion techniques developed for tackling issues like localization, estimation and navigation in mobile robot are presented as well in which they are organised according to relevance, strengths and weaknesses.

Mobile Robots Navigation | MDPI Books
Mobile Robots Navigation | MDPI Books This document summarizes an academic paper on autonomous navigation for mobile robots. it discusses how robots require both sensing capabilities to react to environmental changes and reasoning abilities to plan actions. Abstract this study presents a study on autonomous robot navigation, focusing on three key behaviors: odometry, target tracking, and obstacle avoidance. each behavior is described in detail, along with experimental setups for simulated and real world environments. Recent years have seen a dramatic rise in the popularity of autonomous mobile robots (amrs) due to their practicality and potential uses in the modern world. This review has surveyed a broad spectrum of autonomous navigation techniques for mobile robots, ranging from established graph search algorithms to contemporary learning based methods and the emerging integration of large language models.

Figure 3 From Autonomous Mobile Robot Navigation By Reinforcement Learning Considering ...
Figure 3 From Autonomous Mobile Robot Navigation By Reinforcement Learning Considering ... Recent years have seen a dramatic rise in the popularity of autonomous mobile robots (amrs) due to their practicality and potential uses in the modern world. This review has surveyed a broad spectrum of autonomous navigation techniques for mobile robots, ranging from established graph search algorithms to contemporary learning based methods and the emerging integration of large language models. This paper goes into the realm of sensor fusion based navigation systems for autonomous robots, spotlighting diverse methodologies that underpin their functionality and emerging trends that shape their evolution. The present article focuses on the study of the intelligent navigation techniques, which are capable of navigating a mobile robot autonomously in static as well as dynamic environments. Effective navigation of mobile robots in a dynamic environment poses complex challenges, including mapping, localization, and path planning. these factors are interdependent and require robust solutions for successful robot navigation. To enable autonomous navigation of mobile robots, this section proposes a hierarchical framework integrating local path planning with trajectory tracking control.
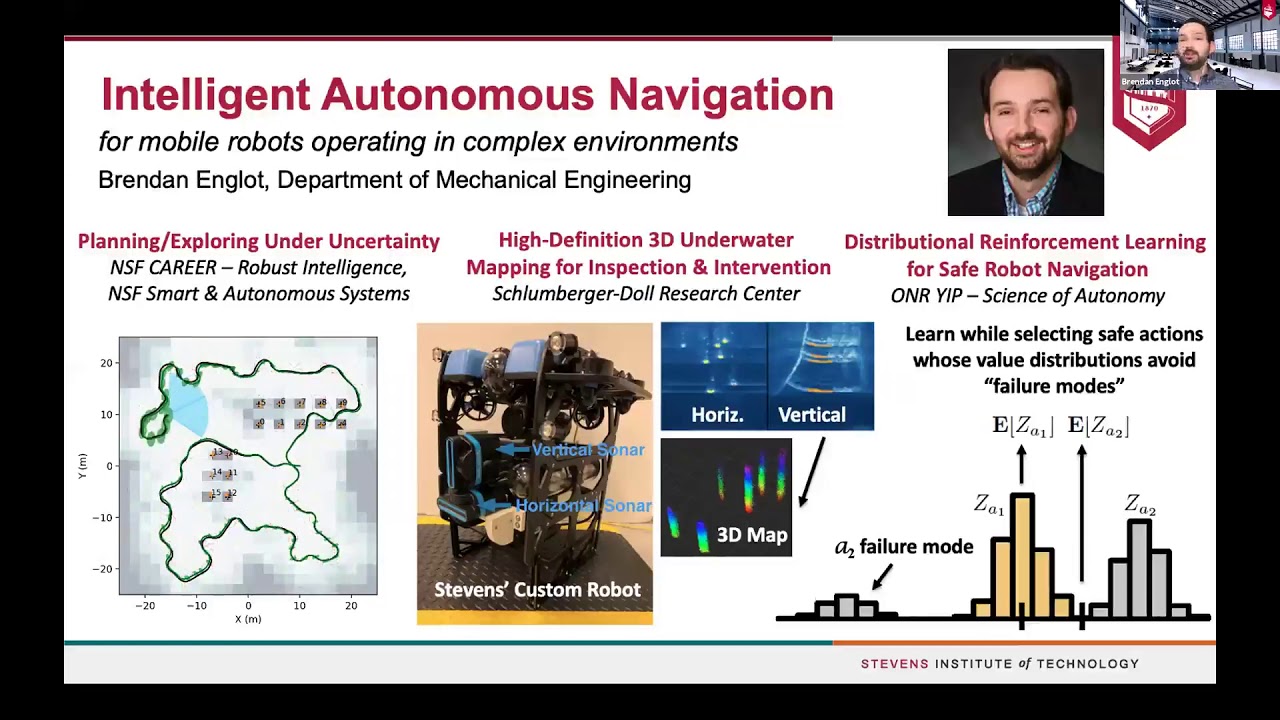
Intelligent Autonomous Navigation for Mobil Robots Operating in Complex Environments
Intelligent Autonomous Navigation for Mobil Robots Operating in Complex Environments
Related image with autonomous navigation of mobile robots from basic sensing to problem solving pdf pdf robot



 Autonomous Navigation Of Mobile Robot Assisted By Its Identified Neural Network Model")



 Simulation Of Autonomous Navigation Mobile Robot System")




Related image with autonomous navigation of mobile robots from basic sensing to problem solving pdf pdf robot




About "Autonomous Navigation Of Mobile Robots From Basic Sensing To Problem Solving Pdf Pdf Robot"
Comments are closed.